Сила
Величина
Направление и точка приложения
І. $F_т$– сила тяжести – сила с которой Земля притягивает к себе все тела. $F_т = mg$
Вектор силы тяжести сонаправлен с вектором ускорения свободного падения. ІІ. $F_{вс}$ – сила всемирного тяготения (сила, с которой тела притягиваются друг к другу)
$G = 6,67*10^{-11} ~Нм^2/кг^2 $ гравитационная постоянная$F=G\dfrac{m_1 m_2}{r^2}$
Если одно из тел это Земля, то $F=G\dfrac{mM_З}{R_З^2}$
$F = G\dfrac{mM_З}{(R_З + h)^2}$
$g_0=G\dfrac{M_З}{R_З^2} = 9.8 \dfrac{м}{с^2}$
$g=G\dfrac{M_З}{(R_З + h)^2}$ ускорение свободного падения над Землей на высоте $h$
$g\text{<}g_0$
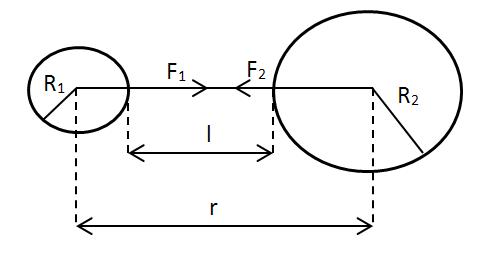
для любой другой планеты $g_{пл.} = G\dfrac{M_{пл}} {R_{пл}^2}$$F_1 = F_2 = G \dfrac{m_1 m_2}{r^2}$, где $r = R_1 + l + R_2$
если $R_1$ и $R_2 \text{<<} l$, где можно обозначить $l = h$, то $r =l$.
$G = 6,67*10^{-11} ~Нм^2/кг^2 $
Вектор силы всемирного тяготения направлен на второе тело со стороны первого.
Если тело ещё и движется вокруг планеты, то:
$\vartheta = \sqrt{a_ц r} = \sqrt{g_\theta r} = \sqrt{G\dfrac{M_{пл}}{(R_{пл} + h)^2}(R + h)} = \sqrt {G\dfrac{M_{пл}}{R_{пл}+h}}$
Если $h$ мало, $\vartheta = \sqrt{G\dfrac{M_{пл}}{R_{пл}}}$
Массу любой планеты шарообразной формы можно вычислить по формуле $M_{пл} = \rho_{пл}V_{пл}$, где объём шара $V_{пл} = \dfrac{4}{3}\pi R_{пл}^3$
Если подставим значение массы Земли и её радиус, то получим для Земли значение скорости вблизи поверхности планеты, это 7,9 * 103 м/с – первая космическая скорость.
т. А находится на широте $\phi$ и $r_A = Rcos~\phi$
Вес тела на экваторе можно вычислить по формуле: $P=mg-ma_ц$
где $a_ц=\dfrac{{2\pi}^2}{T^2}R, \pi^2 \approx 10, \sqrt{10}\approx\pi = 3.14$
ІІІ. вес тела сила с которой тело давит на опору или подвес $P$
Случаи б) и г) характеризуют перегрузку, которую испытывает тело,
$n$ – это число которое показывает во сколько вес тела, движущегося с ускорением больше нормального веса.Для случая б) $n = \dfrac{P}{P_0} = \dfrac{mg+ma}{mg}$
Случай в) может характериховать уменьшение веса или даже невесомость, т.е отсутствие веса$P = 0$, т.е.
$a = g$ (свободное падение)a)$P_0=mg$
б)$P = mg + ma$,
если тело вместе с опорой (подвесом) движется с ускорением $\vec{a}$ вверх (т.е. $\vec{a}↑;\vec{g}↓$)
в) $P = mg~ – ma$, если тело вместе с опорой (подвесом) движется с $\vec{a}$ вниз (т.е. $\vec{a}↓;\vec{g}↑$)
г)$P = m\sqrt{g^2+a^2}$, если тело с $\vec{a}$ движется горизонтальноЕсли тело покоится или движется. Вектор направлен перпендикулярно опоре.
IV Сила упругости возникает при деформации тела и возрастает с ростом деформации
$G=\dfrac{F}{S}$, где $G$ – механическое напряжение деформированного силой $F$ тела, которая действует на площадь $S$.
$G = \epsilon E$, где $\epsilon = \dfrac{\Delta x}{x_0}$ - относительное удлинение
$E$ – модуль Юнга
$F = G*S$
$k \Delta x = GS = \epsilon ES = \dfrac{\Delta x}{x_0} ES$
$[G]$ = 1 Па
$[E]$ = 1 Па
$[k]$ = 1 Н/м
$[S]$ = м2
$[X]$ = м
$\epsilon$ – число
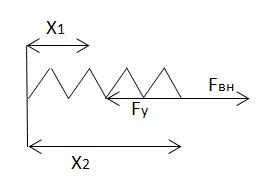
$F_у$ изменяется от 0 до $k \Delta x$ и равна внешней $F$ действия$F_y = k\Delta x$ - формула закона Гука
$\Delta x = x_2 - x_1$
$F_y = k\Delta x$
$F_{у2}\text{>}F_{у1}$если говорить о $F_y$ на участке АВ, то
$\text{<}F_y\text{>} = \dfrac{F_{y1} + F_{y2}}{2}$ $\text{<}F_y\text{>} = \dfrac{k \Delta x_1 + k \Delta x_2}{2}$Коэффициент упругости (жёсткость) $k$ зависит от рода вещества и его геометрических размеров
а) если нити (пружины, проволока и т.д.) соединены || друг другу, то $k_{общ} = k_1 + k_2 + k_3 +…$)
или $k = N k_1$
б) если нити последовательно соединены, то $\dfrac{1}{k} = \dfrac{1}{k_1} + \dfrac{1}{k_2} + \dfrac{1}{k_3} + ...$
или $\dfrac{1}{k} = \dfrac{N}{k_1}$$\vec{F_y}↑↑\Delta\vec x$ т. приложение к центру масс
$N$ и $T$ определяется теми же формулами, что и $F_у$ и через условие задач
$N$ – возникает, если тело лежит и деформирует опору
$T$ – возникает, если тело деформирует подвес
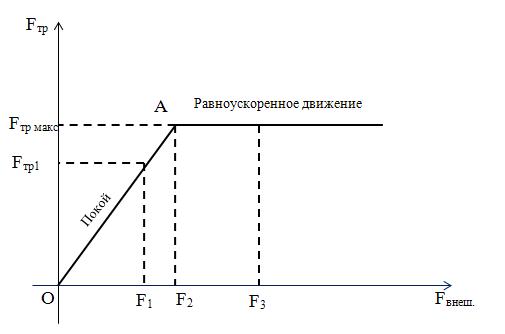
V. Сила трения$ F_{тр}$ $F_{тр~max}= \mu N$
$F_{тр}$ изменяется от 0 до $F_{тр~max}$$F_{тр~max}↑↓\Delta r$ всегда возникает между поверхностями соприкосновения, но действует на тело На отрезке ОА Fтр = Fвнешней и растет вместе с ней в т.А Fвн = Fтр max = μN - тело начинает двигаться Рм далее от т.А и в $\propto$ с ростом Fвнешн, Fтр уже не изменяется и всегда равна Fтр max= μN, но т.к. Fвн стала > Fтр max, то тело начинает двигаться с ускорением. VI. $F_{давл}$ – сила с которой тело давит на другое тело (это может быть вес или другая сила мышц) $F_{д}=pS$
$p$ – давление
а)$p = \dfrac{F}{S}$ для всех тел
б) $p = \rho_ж gh$для жидкостей
в) $p = \rho_г gh$для газов
$p_{дно} = \rho_ж gh$, где $h$ глубина
$p_{бок} = \rho_ж g\dfrac{h}{2}$ во все направления одинаковоТочка приложения – центр масс. VII. Сила Архимеда – выталкивающая сила возникает в жидкости или газе $F_A$ $F_A = \rho_ж g V_{погр}$
$F_A = \rho_г g V_{погр}$
$F_A = P_{ввозд} - P_{вводе}$
$F_A = F_2 - F_1$$F ↑↓ mg$ выталкивает тело вверх
- если $F_A= mg$, тело покоится в любой точке жидкости или движется ↑↓ Рм
- если $F_A> mg$, то тело всплывает с ускорением
- $F_A– mg = ma$, всплывает до тех пор пока $V$ тела не станет таким что $F_A$ станет = $mg$
- $F_A> mg$, тело тонет с ускорением $mg - F_A= ma$
О сайте|Разработчики
fizmatushki © 2019
e-mail:fizmatushki@yandex.ru
